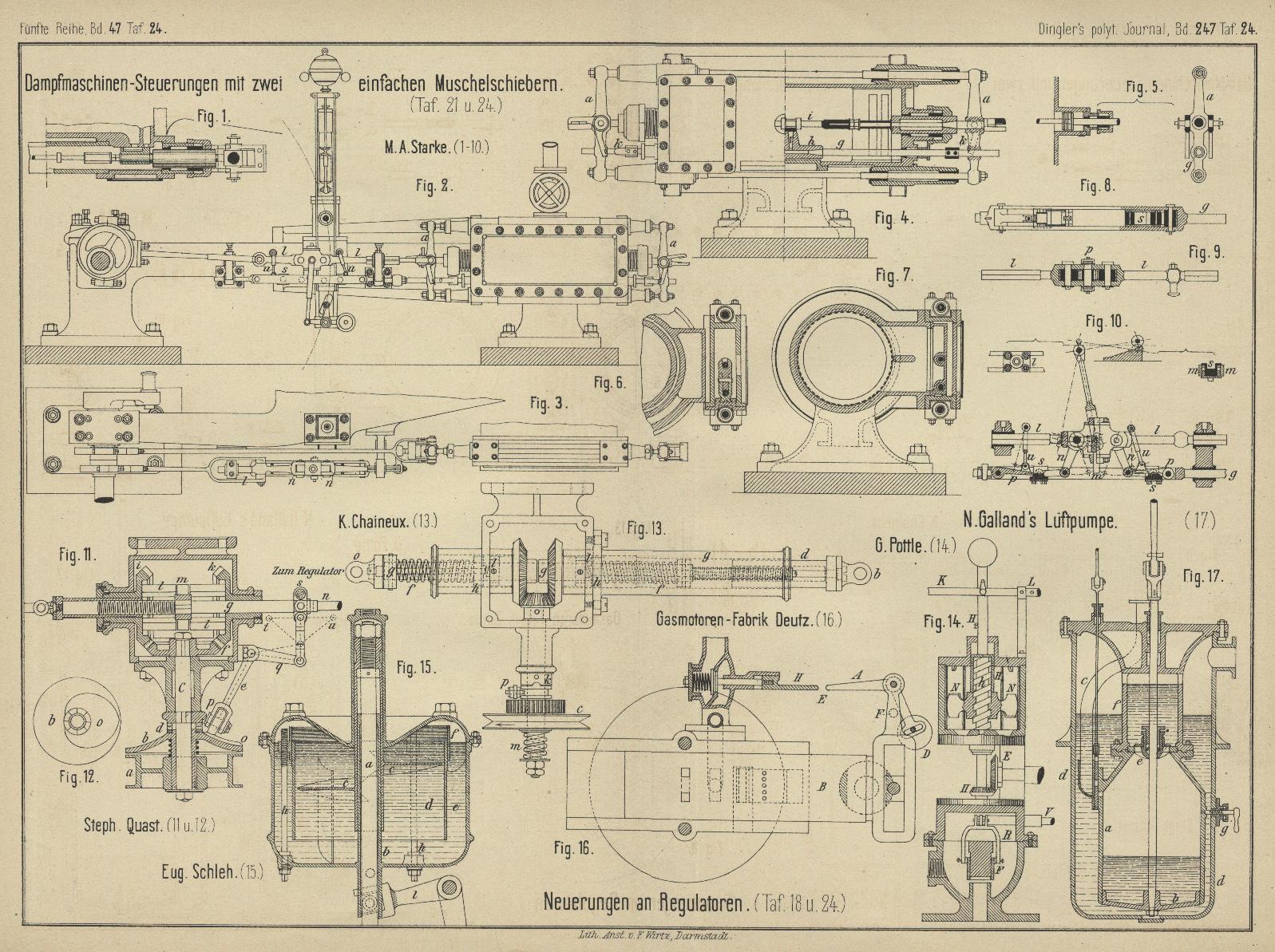
| Titel: | Ueber Neuerungen an Regulatoren. |
| Fundstelle: | Band 247, Jahrgang 1883, S. 229 |
| Download: | XML |
Ueber Neuerungen an Regulatoren.
Patentklasse 60. Mit Abbildungen auf Tafel 18 und 24.
Ueber Neuerungen an Regulatoren.
E. A. Bourry in St. Gallen hat an seinem dynamometrischen Regulator (* D. R. P. Nr. 8277, vgl.
1880 236 * 188), welcher sich direkt mit Kraft und
Widerstand in Verbindung setzt und eine elastische Kupplung zwischen einer
treibenden und einer getriebenen Welle bildet, die Neuerung angebracht (Zusatz * D.
R. P. Nr. 13411 vom 7. August 1880), daſs er statt der Zugfedern der elastischen
Kupplung bogen- oder spiralförmige Stoſsfedern verwendet. Das durch eintretende
Veränderung des Widerstandes hervorgerufene Spiel dieser Federn wird benutzt, um die
jeweilige dynamische Belastung des Motors, also die übertragene Kraft auf einem
Zifferblatt zu markiren und auch auf einem stetig vorbei bewegten Papierstreifen
aufzuzeichnen. – Da die Federn die ganze Kraft des Motors von der treibenden auf die
getriebene Welle übertragen müssen, so wird die Construction für groſse Kräfte nicht
in genügend haltbarer Weise auszuführen sein; andererseits haben die
dynamometrischen Regulatoren den Nachtheil, daſs sie nur bei Veränderung des
Widerstandes, nicht aber bei Veränderung der Triebkraft reguliren.
Für Centrifugaltachometer sind verschiedene Neuerungen
patentirt worden, welche einerseits das Bestreben zeigen, die Astasie bis zu einem
bestimmten Grade zu erreichen und dabei doch dem Regulator eine gewisse Stabilität
zu geben, wie sie den statischen Regulatoren eigen ist; andererseits betreffen die
Neuerungen die Construction des Uebertragers.
Ludw.
Beurmann in Ilfeld am Harz (* D. R. P. Nr. 18294 vom 23. August 1881) gibt der Bahn der
Schwungkugelmittel eine epicyklische Form, indem ein auf der Regulatorspindel
festgekeilter Zahnbogen u, wie Fig. 1 Taf.
18 zeigt, in zwei mit den Schwungkugeln k fest
verbundene Zahnsegmente v greift; diese letzteren sind
drehbar aufgehängt an dem Spindelkopf und an dem als Gehäuse gebildeten
Belastungsgewicht angelenkt. Die Mittelpunkte der Kugeln k beschreiben somit verlängerte Epicykloiden, welche durch entsprechende
Wahl der Dimensionen allerdings der theoretischen Führungslinie der Kugelmittel
entsprechend geformt werden können.
H.
Mühlrad in Buckau-Magdeburg (* D. R. P. Nr. 1712 vom 4. Juli 1877) hat einen
Centrifugalregulator so ausgeführt, daſs ein einfaches Pendel durch einen
Gegenlenker derart auf ein Belastungsgewicht wirkt, daſs die vom Pendel geleistete
Arbeit in jedem Augenblick gleich oder beliebig abweichend von der zu leistenden
Arbeit des Belastungsgewichtes ist. Im ersten Fall ist der Regulator astatisch, im
zweiten Fall pseudoastatisch. Hierbei kann die Pendelachse fest und die Curvenbahn
mit dem Belastungsgewicht verschiebbar sein, oder die Curvenbahn ist fest und die Pendelachse ist
mit dem Belastungsgewicht verschiebbar; letztere Anordnung ist in Fig. 2 Taf.
18 gezeichnet.
A. Dehne in Halle a. S. (*D. R. R Nr. 19502 vom 16. März
1882) hängt die Schwungkugelarme d mit den Gelenken a an die Lenkerstangen l
(Fig. 3 Taf. 18), welche sich um die im Gehäuse festliegenden Achsen c drehen können. Dabei führen sich die Arme d in den Gleitbahnen der Stücke e, welche sich um die in dem Gehäuse B
festliegenden Achsen f drehen können. Die Stücke e stützen sich mit den Armen g unter Vermittelung der Rollen h auf die mit
der Regulatorspindel fest verbundene Hülse i. Beim
Heben der Kugeln A drehen sich die Stücke e um f und das ganze
Gehäuse wird gehoben, wobei die Schwungkugelmittel S
eine Bahn beschreiben, welche nach Wahl der Abmessungen der theoretischen Curve
angepaſst werden kann.
G.
Hagelin in Stockholm (* D. R. P. Nr. 11283 vom 8. Mai 1880) benutzt die Trägheit
einer schweren Schale, welche durch Reibung in Rotation versetzt wird, um einen
Regulator zu erhalten, der in bestimmten Grenzen bei Eintritt des Gleichgewichtes in
jeder Lage zur Ruhe kommt und dabei den notwendigen Grad von Unempfindlichkeit
besitzt. Wie aus Fig. 4 Taf.
18 zu sehen, endigt die Regulatorspindel in eine mehrgängige Hohlschraube; die
Spindel b ist durch die Hülsenmutter m fest mit der schweren Schale B verschraubt. Letztere ist durch die Stifte s,
s1 gegen ein Guſsstück A prismatisch geführt, welches zwei wagrechte Schlitze
hat, um die mit Rollen besetzten Zapfen zweier Walzen a
zu führen. A sitzt lose auf einem Bund c der Regulatorspindel, B
liegt mit seiner parabolischen Innenfläche auf den Walzen a. Nach eingeleiteter Bewegung wird die Schale B durch die Spindel veranlaſst zu rotiren. Die durch die Centrifugalkraft
nach auſsen getriebenen Walzen a suchen die Schale B zu heben; sobald letztere durch ihre Trägheit der
rotirenden Spindel nacheilt, muſs sie auch dem Schraubengang folgend nach aufwärts
gehen. Es wird somit je nach der Geschwindigkeit eine Gleichgewichtslage in
bestimmter Höhe eintreten, welche dann möglichst erhalten bleiben wird. Bei
beschleunigtem Gange bleiben die Theile A und B wegen ihrer Trägheit zurück, wobei sich B aufwärts schraubt und durch die Centrifugalkraft der
Rollen a darin unterstützt wird; bei eintretender
Verzögerung eilen B und A
voraus, B schraubt sich ab und die Rollen a gehen nach innen. Die Bewegung von B wird auf die Zulaſsvorrichtung übertragen.
Das Zusammen- und Entgegenwirken verschiedenartiger Kräfte haben auch Ehrhardt
und Sehmer in Malstatt-Saarbrücken (*
D. R. P. Nr. 11269 vom 20. Februar 1880) benutzt, um
einen energischen Regulator von bestimmtem Unempfindlichkeitsgrad zu erhalten;
derselbe wirkt direkt auf das Excenter der äuſseren Steuerung und verstellt dessen
Excentricität und Voreilwinkel. Auf der Dampfmaschinenwelle ist eine Scheibe S (Fig. 5 Taf.
18) aufgekeilt, um deren zwei Zapfen b das
Hebelparallelogramm dd1
sich bewegen kann. Die
Arme des letzteren sind verlängert; zwei davon tragen die Gewichte g und an die anderen zwei sind die Gewichte G angelenkt, welche durch Federn F belastet werden, die mittels der Stangen Z zusammengehängt sind. In der Ruhelage berühren die
Gewichte g fast die Gelenkpunkte d. Bei der Bewegung wirkt der Fliehkraft der Gewichte
G und g die
Federspannung von F entgegen; letztere muſs der
verlangten Energie entsprechend gewählt werden. Möglichst stetigen
Gleichgewichtszustand innerhalb gewisser Grenzen von Umdrehungszahlen kann man durch
Wahl der Gewichte G und g
erreichen. Einer der Zapfen b durchdringt die Scheibe
S und verstellt eine Kurbel, welche dann die
Verschiebung der Excenterscheibe in einer Führung bewirkt.
Die Energie eines gewöhnlichen Schwungkugelregulators zu vergröſsern, hat E.
Mas in Rive de Gier, Frankreich (*
D. R. P. Nr. 12038 vom 20. Juli 1880) die
Schwungkugeln k (Fig. 6 Taf.
18) mit Hülsen versehen und auf den Armen h
verschiebbar angebracht; die Federn f ziehen die Kugeln
nach innen. Bei vergröſserter Geschwindigkeit werden die Federn durch die
Centrifugalkraft zusammengedrückt und durch Herausgehen der Kugeln wird eine
Vergröſserung des Hebelarmes erzielt.
Als Neuerung an direkter Uebertragung von einem
Centrifugalregulator auf die Dampfzulaſsvorrichtung ist die Hebel- und
Stangencombination zu bezeichnen, welche R. Dreyscharff in
Chemnitz (* D. R. P. Nr. 18853 vom 6.
Januar 1882) patentirt erhielt. Dieselbe dient dazu, einen oscillirenden,
theilweise entlasteten Kreisschieber, welcher den Dampfeintritt vermittelt, je nach
dem Ausschlag der Schwungkugeln zu verstellen. Die Arme der letzteren sind über die
Drehpunkte hinaus verlängert und greifen beide an der Regulatorstange an, welche die
Hebelverbindung bethätigt.
Der bekannte Constructeur G. H. Corliſs in Providence, Nordamerika (* D. R. P. Nr. 10595 vom 27. Mai
1879) hat einen Mechanismus angegeben, welcher eine direkte Uebertragung
von einem gewöhnlichen Geschwindigkeitsregulator auf die bekannte Corliſs-Präcisionssteuerung bewirkt, jedoch nur eine
vorher durch Verstellung eines Handhebels fixirte Maximaldauer des Dampfeintrittes
erreichen kann. Fig. 7 Taf.
18 zeigt, daſs die von dem Tachometer B bewegte
Regulatorhülse die Stange I mitnimmt, deren Nase i, unter den Stift i1 einer Stange E
greifend, letztere verstellt. An der Stange E befinden
sich die Keilflächen e und e1, welche die Verstellung der Auslöser
der Präcisionssteuerung bewirken; die Stangen a und a1 bethätigen die
Ventile der letzteren. Die Stange E greift an dem auf
der Achse F fest sitzenden Hebel G an, in welcher ein Stift f befestigt ist. Wenn die Schwungkugeln sinken, so verläſst die Nase i den Stift i1 und Stange E sinkt,
im Maximum jedoch nur so tief, bis der Stift f gegen
die beiden Anschläge c der Nabe des Hebels C schlägt. Da beim Sinken von E der Dampfeintritt verlängert wird, so wird letzterer nur eine gewisse
Maximaldauer erreichen können, die durch die Stellung des Handhebels C fixirt ist.
Bei Dampfmaschinen zum Pumpenbetrieb wird noch ein Druckregulator eingeschaltet, der
aus dem Cylinder L und dem Kolben K besteht, welch letzterer durch ein Gewicht O beschwert ist; das Rohr N steht mit der Wasserleitung in Verbindung. Steigt der Druck in
letzterer, so geht K und damit die Kolbenstange M in die Höhe; der an letztere gehängte Hebel H bewegt dann die Achse F,
schiebt damit die Stange E nach aufwärts und somit
erfolgt eine frühere Auslösung der Steuerung, also ein kürzerer Dampfeintritt. Sinkt
der Druck in der Leitung, so fallt der Kolben K unter
Einwirkung des Gewichtes O und der Dampfeintritt wird
verlängert, jedoch nur bis zu dem durch die Handhebelstellung bestimmten Grade.
Beide Regulatoren arbeiten somit von einander unabhängig, um den Dampfeintritt
abzukürzen; jedoch können sie denselben nicht über einen bestimmten Punkt
verlängern, der entweder durch die Stellung des Handhebels C gegeben ist, oder durch die Lage des in der tiefsten Stellung
befindlichen Regulators. Diese Vorrichtung ist ganz zweckmäſsig; sie verhütet ein
Durchgehen der Maschine und gewährt doch den Regulatoren eine bestimmte, von
einander unabhängige Einwirkung innerhalb fixirter Grenzen.
Der direkt wirkende Uebertrager von O. Lilienthal in
Berlin (* D. R. P. Nr. 18471 vom 20.
December 1881) sitzt unmittelbar auf einer Verlängerung der Kurbelwelle
und verstellt Hub und Voreilwinkel des Expansionsexcenters. Bei vermehrter
Geschwindigkeit drückt der Regulator entgegen der Spannung der Feder x (Fig. 8 Taf.
18) den Stempel S in die hohle Kurbelwelle, bewegt also
durch die schrägen Leisten l, welche in entsprechende
Nuthen n eines Querprismas P greifen, das letztere und dadurch das Expansionsexcenter auf demselben.
Da die Neigung der Leisten am Stempel geringer als der Reibungswinkel ist, so kann
durch die vom Excenter zu übertragende Kraft keine Rückwirkung auf den Regulator
ausgeübt werden; auch sonst ist die Erfindung einfach und zweckmäſsig.
Indirekt
wirkende Uebertrager. K. Gabler in
Chemnitz (* D. R. P. Nr. 10888 vom 5.
März 1880) erzielt eine indirekte Uebertragung mittels eines
Schaltwerkes. Wie aus Fig. 9 und
10 Taf. 18 ersichtlich, sind in dem Arm a
eines um p drehbaren Winkelhebels, an dessen anderen
Arm q die Regulatorstange angreift, zwei Klinken b und c drehbar gelagert.
Diese werden durch Federn, welche sich gegen geneigte Flächen ihres Zapfens stützen,
wider den Bogen d gedrückt in der Weise, daſs, wenn
eine Klinke aufliegt, die andere sich abhebt. Bei vermehrter Geschwindigkeit wird
der Winkelhebel gedreht; die eine Klinke greift in die fein gezahnte Fläche von d und bewegt diesen Bogen, damit ein hahnartiges
Drosselventil zur Absperrung des Dampfes. Ist die Normalgeschwindigkeit dann erreicht, so geht die
Klinke wieder in die Mittelstellung zurück, ohne aber den Bogen d zu beeinfluſsen; erst wenn eine Aenderung der
Geschwindigkeit eintritt, kommt die eine Klinke wieder in Thätigkeit. Das
Belastungsgewicht ist durch eine Feder g gegeben,
welche mittels des drehbaren Stellringes h und einer
Schraube i in ihrer Büchse r während des Ganges eine solche Regulirung ihrer Spannung gestattet, daſs
eine andere Normalgeschwindigkeit der Maschine erreicht werden kann.
Leo
Funck in Aachen (* D. R. P. Nr. 14159 vom 4. November 1880) benutzt auch ein
Schaltwerk, indem die Regulatorstange, wie Fig. 11
Taf. 18 zeigt, bei A an einem Winkelhebel w angreift, in welchem ein Zahnrädchen r mit fest daran befindlichem Schirm s eines Francis'schen
Wendegetriebes gelagert ist. Das Rädchen r greift in
ein Rad R ein, auf dessen Achse eine gezahnte Scheibe
S sitzt und das die Bewegung zur
Dampfzulaſsvorrichtung vermittelt. Bewegt sich unter dem Einfluſs der Schwungkugeln
der Winkelhebel w, so wird das Rädchen r auf R abrollen und der
Schirm wird in eine solche Lage kommen, daſs eine der beiden Klinken eingelöst wird;
diese bewegt dann die Scheibe S, damit auch das Rad R, wodurch r, also auch
der Schirm zurückgedreht und die arbeitende Klinke ausgelöst wird. Die Hin- und
Herbewegung von R bewirkt die Regulirung.
Dieser Uebertrager gestattet also dem Regulator, in jeder Stellung zur Ruhe zu
kommen, indem das Wendegetriebe ausgerückt bleibt, so lange die Geschwindigkeit
constant ist; sobald aber letztere ab- oder zunimmt, wird die eine oder die andere
Klinke eine Verstellung der Zulaſsvorrichtung herbeiführen. Die letzt beschriebenen
Regulatoren von Gabler bezieh. Funck wirken in so fern mit direkter Uebertragung, als die Energie der
Regulatoren selbst im Stande sein muſs, die Dampfzulaſsvorrichtung zu verstellen; es
können also groſse Kräfte damit nicht ausgeübt werden. Durch Verwendung von
Reibungs- oder Zahnkupplungs-Wendegetrieben kann man aber bekanntlich die
Verstellung der Dampfzulaſsvorrichtung mit beliebig groſser Kraft erreichen, indem
der Regulator dann ein leicht bewegliches Getriebe verstellt, welches durch Kupplung
ein zweites Getriebe in Bewegung setzt, das mit beliebiger Kraft die Steuerung
bethätigt. Würde hierzu ein astatischer Regulator verwendet werden, der also in
jeder Lage zur Ruhe kommen kann, sobald die Normalgeschwindigkeit erreicht ist, so
würde die Kupplung eingerückt bleiben, wenn beim Steigen oder Fallen des Regulators
aus der Mittelstellung die Einkupplung einmal erfolgt ist; somit würde ein weiteres
Schlieſsen oder Oeffnen der Dampfzulaſsvorrichtung stattfinden, bis die
Geschwindigkeit so weit gesunken oder gestiegen ist, daſs die Schwungkugeln ihre
Mittelstellung einnehmen, bei welcher das Wendegetriebe ausgerückt ist. Der
astatische Regulator würde also einen sehr ungleichförmigen Gang erzielen. Es kann
somit bei dem gewöhnlichen Wendegetriebe bloſs ein statischer Regulator zur Verwendung kommen, der
nur in einer Lage zur Ruhe gelangt, bei welcher dann die Kupplung ausgerückt ist. Um
aber auch astatische Regulatoren verwenden zu können, wird der indirekte Uebertrager
mit einer Stellhemmung versehen, welche unter der Einwirkung der von den
Schwungkugeln direkt bewegten Theile nach einem bestimmten Wege die Auskupplung des
Wendegetriebes selbstthätig bewirkt.
Ein solcher Uebertrager wurde von Steph. Quast in
Aachen (* D. R. P. Nr. 16159 vom 22.
März 1881) construirt. Hier ist die Bewegung der Steuerung direkt
proportional der senkrechten Bewegung des Regulators, also eigentlich eine direkte
Uebertragung erzielt, jedoch mittels des Wendegetriebes eine beliebig groſse Kraft
zur Verstellung der Steuerung wirksam gemacht. Wie aus Fig. 12
Taf. 18 zu ersehen, werden die senkrechten Bewegungen des Pendels durch die Scheibe
k und die Stangen f
auf die Mutter e des Kupplungsmuffes c übertragen. Ein von der Maschine getriebenes Kegelrad
bewegt stetig die Kegelräder b und a. Steigt oder fällt der Regulator, so wird die
Kupplung c in b oder a eingerückt und die beiden Schraubenspindeln c und d drehen sich, die
beiden Muttern e und g
schrauben sich also auf- oder abwärts; somit kann die Regulatorhülse i weiter steigen oder fallen. Zugleich wird aber die
Mutter g durch Stangen den Muff h heben oder senken und zwar proportional der Bewegung von i, da die Gewinde von c
und d gleiche Steigung und Richtung haben. Der Muff h greift an das Stellzeug an. Sobald aber der Regulator
zur Ruhe kommt, schraubt sich der Kupplungsmuff c
abwärts und rückt damit die Kupplung aus; der Muff h
bleibt also auch stehen.
Diese Construction ist ganz zweckentsprechend, leidet jedoch an dem Uebelstand, daſs
die Klauenkupplung sich leicht abnutzt, indem im Augenblick des Eingreifens zuerst
die Zähne auf einander reiben werden, bis sie weit genug in einander greifen; dieses
Versagen wird um so mehr auftreten, je gröſser die Geschwindigkeit der Kegelräder
und je weiter bereits die Abnutzung der Zahnkanten vorgeschritten ist.
R. Pröll hat, um diesem Uebelstand zu begegnen, einen
Einrückmechanismus für indirekte Uebertrager erfunden (* D. R. P. Nr. 10860 vom 29.
Februar 1880, Zusatz zu Nr. 2196, vgl. 1880 236 * 276),
welcher zur Wirkung gelangt, sobald der Regulator das Bestreben zeigt, die Kupplung
oben oder unten zum Eingriff zu bringen, und die Zahnkanten fast bis zur Berührung
einander genähert hat. Der Eingriff der Kupplungszähne erfolgt dann mit
Maschinenkraft fast augenblicklich und sicher. Der Mechanismus ist in Fig.
13 Taf. 18 abgebildet. Ein auf der Antriebswelle W sitzendes Excenter l bewegt durch die
Lenkerstange F und einen um die Achse w oscillirenden Winkelhebel den Rahmen B, welcher noch an einer Achse J aufgehängt ist, auf und ab. Der um D
drehbare Einrück- und Ausrückhebel bewegt zwei Klinken k1, k2, welche zwei Seiten eines um G drehbaren Gelenkviereckes bilden: sobald durch den Regulator das
Kupplungsstück b den Zähnen des einzukuppelnden Rades
genähert ist, wird k1
bezieh. k2 von den
Kanten s1 bezieh. s2 des Rahmens B erfaſst und durch letzteren der Hebel A mit dem Kupplungsstück b
in die entsprechenden Zähne eingedrückt werden, noch ehe der Regulator das Stück b in die zum Einkuppeln erforderliche Lage gebracht
hat. Damit bei gleichzeitiger Wirkung der Ein- und Ausrückvorrichtung, welch
letztere sich von der des Hauptpatentes nicht unterscheidet, kein Bruch der Theile
eintritt, ist die Stange F elastisch gemacht. Dieser
Einrückmechanismus macht den indirekten Uebertrager zum Bewegen schwer beweglicher
Verstellungsvorrichtungen bei Dampfmaschinen, wie des Steins der Coulisse oder der
Expansionsplatten der Meyer-Steuerung, geeignet.
E. Hartmann in Augsburg (* D. R. P. Nr. 14876 vom 11.
Januar 1881 als Zusatz zu * D. R. P. Nr. 3828) hat die ursprüngliche Klauenkupplung
wegen des angegebenen Uebelstandes durch eine Reibungskupplung ersetzt. Der
Uebertragungsmechanismus ist den Bedingungen entsprechend construirt, welche auch
für den beschriebenen Quast'schen Uebertrager
maſsgebend waren; es ist auch hier die nach dem Steuerorgan abgegebene Bewegung
proportional in Ausschlag und Geschwindigkeit der stets variablen Bewegung des
Hülsengewichtes. Die auſsen liegenden Reibungsräder sind auf der Achse verschiebbar
und in ihren Gegenrädern schwebend erhalten durch Bolzen, welche in den Schienen b verstellbar befestigt sind. Wie Fig. 14
Taf. 18 zeigt, sind letztere durch eine Achse c drehbar verbunden mit dem Hebel e c d, welcher in e an der
Regulatorhülse aufgehängt ist und an einem Winkelhebel angreift, dessen einer Arm
als Schraubenmutter gebildet ist. Hebt sich die Regulatorhülse, so dreht sich der
Hebel e c d um den augenblicklichen Drehpunkt d und die Schienen b heben
die beständig rotirenden Reibungskegel; das Dreikegelrädergetriebe wird in Bewegung
gesetzt, die als Schraubenspindel gestaltete Achse des Mittelrades bewegt den
Winkelhebel, senkt dadurch den Punkt d und rückt die
Kupplung wieder aus. Herrscht am Regulator Gleichgewicht, so befindet sich der
Stellhebel in Ruhe; so lange die Regulatorhülse sich bewegt, wird auch das von den
Zapfen d aus bethätigte Stellzeug sich bewegen; jedoch
kommt dieses wieder sofort zum Stillstand, wenn beim Eintreten einer neuen
Gleichgewichtslage die Regulatorhülse sich wieder in Ruhe befindet. Dieser
Regulator, welchen die Maschinenfabrik L. A. Riedinger
in Augsburg ausfuhrt, entwickelt somit bei groſser Empfindlichkeit eine bedeutende
Energie.
(Schluſs folgt.)